| 指導教授 | 傅建中 教授 |
| 博士後研究員 | |
| 博士生 | |
| 碩士生 | 紀思辰、葉翰霖、黃宇平 |
雙光子微影技術(Two-Photon Polymerization, TPP)是一種雷射直寫技術(Laser Direct-Write, LDW),藉由照射兩倍光阻聚合波長的雷射光,使得光阻內分子發生雙光子吸收(Two-Photon Absorption, TPA),當累積能量超過光阻聚合閾值時,光阻就會開始聚合並產生連鎖反應,形成結構。
傳統微影技術中的單光子聚合,分子發生單光子吸收的機率與光強度呈線性關係,這種線性關係導致光阻只要照光就會開始反應,在不希望加工的區域也會發生聚合,導致結構缺陷。而多光子吸收的發生機率與光強度的高次方成正比,非線性的關係讓操作者可以透過控制光強度的分布,改變聚合反應發生的位置,進而控制結構產生的區域。雙光子微影技術可以透過光路設計控制光強度分布,使得聚合區域被侷限在很小的範圍內,也因為非線性光學的特性,最小的聚合範圍可以突破阿里繞射極限(Airy Disc Diffraction Limit),使得雙光子微影技術可製作微奈米尺度的3D立體結構,並有著極高的加工精度。
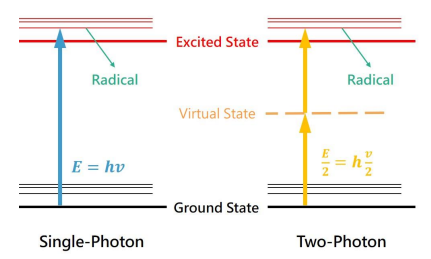
圖 1 (a) 單光子吸收 (b) 雙光子吸收
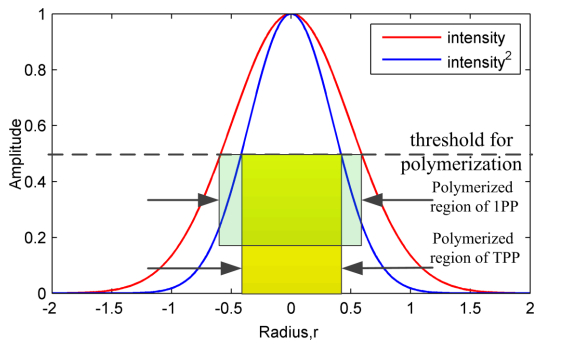
圖 2 雙光子與單光子聚合反應發生範圍 [1]
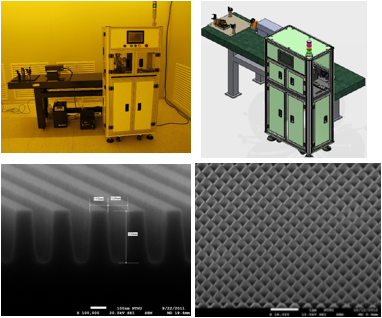
本實驗室設計建構一套全新的壓電式奈米級3D微結構加工系統(圖1),擁有高精度三軸與長行程雙軸堆疊式奈米定位平台,最高加工運動解析度在XY方向達0.4nm,Z方向1nm;最大運動行程達1500μm。比一般文獻所提的雙光子加工所需的100nm解析度高了100倍。我們也針對壓電平台作動態匹配校正,路徑準確性與運動穩定性的提升對加工品質有很大的助益。
在硬體設計方面,由於各平台的重量與移動精度不同,其負載的拉推力極限也不相同,因此移動平台的擺放次序,是相當重要的課題,負載的重量多寡,對平台移動的精度與速率等性能有嚴重影響。考量負載拉推力、應力集中等問題,並期望系統有最佳的反應速率與最好的頻率響應,在不影響支撐的原則下,我們將轉接座簍空偷輕加工來減少重量。另一方面,針對顯微鏡物鏡對焦距離與試片安裝,我們設計凸起的方型試片固定座,框邊外徑為17mm內徑12mm,略小於18×18mm的蓋玻片,特殊的試片固定座中心挖空設計,讓後續進行正面曝光或反面曝光都有很大的加工彈性。
在光路設計方面,考量到後續對焦點狀況與加工狀況的掌握,我們設計了一套即時觀測光路系統,透過適當鏡片的挑選與光路的調整,達到加工光與觀測光同時進入顯微鏡,可即時觀測光阻聚合的位置與狀況。
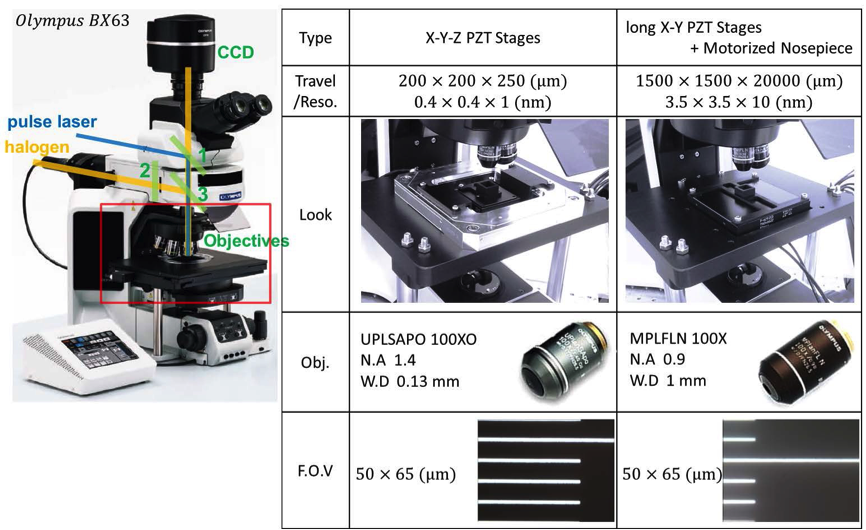
圖 1 本團隊建立的高精度/長行程壓電式3D加工系統
利用市售商業3D繪圖軟體繪出欲加工之圖檔,即可經由我們開發的切層軟體直接轉檔運算,配合CNC運動控制軟體,可將圖形在我們建置之3D加工系統製造出來。
操作流程如下:首先將要加工的3D結構,利用市售繪圖軟體繪製完成,並轉存成STL(Stereolithography)檔。接著使用我們自行撰寫的切層軟體,將3D圖檔以任取二軸之平面,切割圖形規劃加工路徑,生成CNC加工程序碼。操作介面如圖2所示。
CNC運動控制軟體掌控整個加工機的運動,控制系統所需之程式碼(NC Code),透過人機介面(MMI)送入解碼器(DEC),解碼後將運動平台可辨讀之加工碼透過即時運動控制(Sync Motion Control)依序送入奈米運動平台控制器(PZT Controller),達到同步運動控制之效果,最後壓電系統依照加工碼運動,完成加工動作獲得實驗結果。CNC控制介面如圖2所示,此介面分為三大部份,系統狀態、指令輸入部分與輸出部分,指令輸入部分又分為三種輸入模式:控制器原生指令輸入、點到點輸入及函式輸入。輸出部分有各式燈號確認平台運轉狀況、執行中的運動指令以及平台位置及速度,並有一座標圖表標示平台運動位置點紀錄。
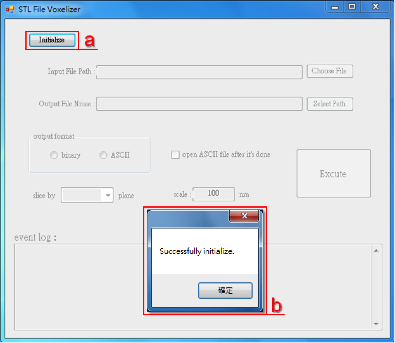
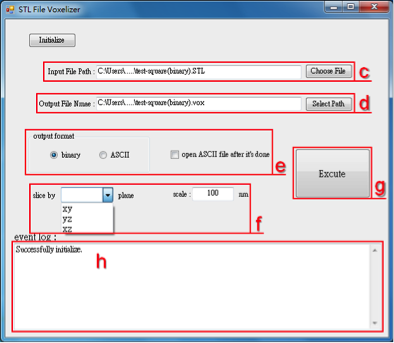
圖 2 CAD/CAM切層軟體之使用者介面初始化(左)與操作過程演示(右)
(a)軟體初始化(b)初始化成功確認視窗(c)讀取副檔名為stl之3D立體圖檔
(d)輸出檔案設定(e)編碼格式設定(f)切層基準面與間距(g)執行切層(h)狀態資訊欄
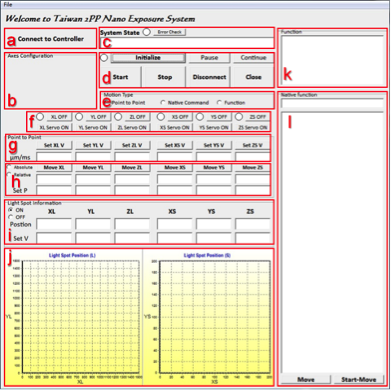
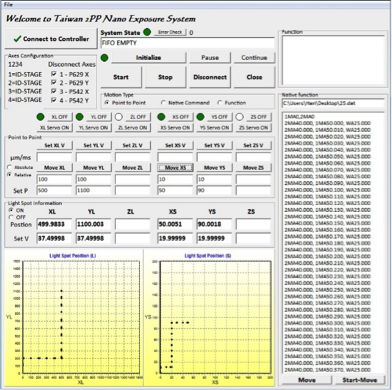
圖 3 CNC控制軟體之使用者介面(左)與操作狀態顯示(右)
(a)連結控制器(b)選擇平台(c)狀態資訊欄(d)操作按鈕(e)控制模式(f)伺服狀態(g)點到點速率
(h)點到點距離輸入(i)位置與速率顯示(j)移動狀態座標圖示(k)函式輸入(l)原生指令輸入
藉由特殊方向的試片擺設與顯影試片的反覆翻轉,有效移除顯影時所產生的膠狀物質並將卡在結構中的氣泡一併釋出,達成結構的表面粗糙度控制。在製程參數的建立方面,先採用低倍率的物鏡(40X)搭配簡單形狀的圖形測試微影劑量參數,針對更為複雜之圖形樣式則搭配高倍率高NA值的物鏡,以最佳化系統參數進一步縮小加工線寬。
我們使用波長780nm雷射搭配100倍物鏡作曝光,加工結果(圖4)為一般幾何圖形,可看出顯影製程的穩定性。
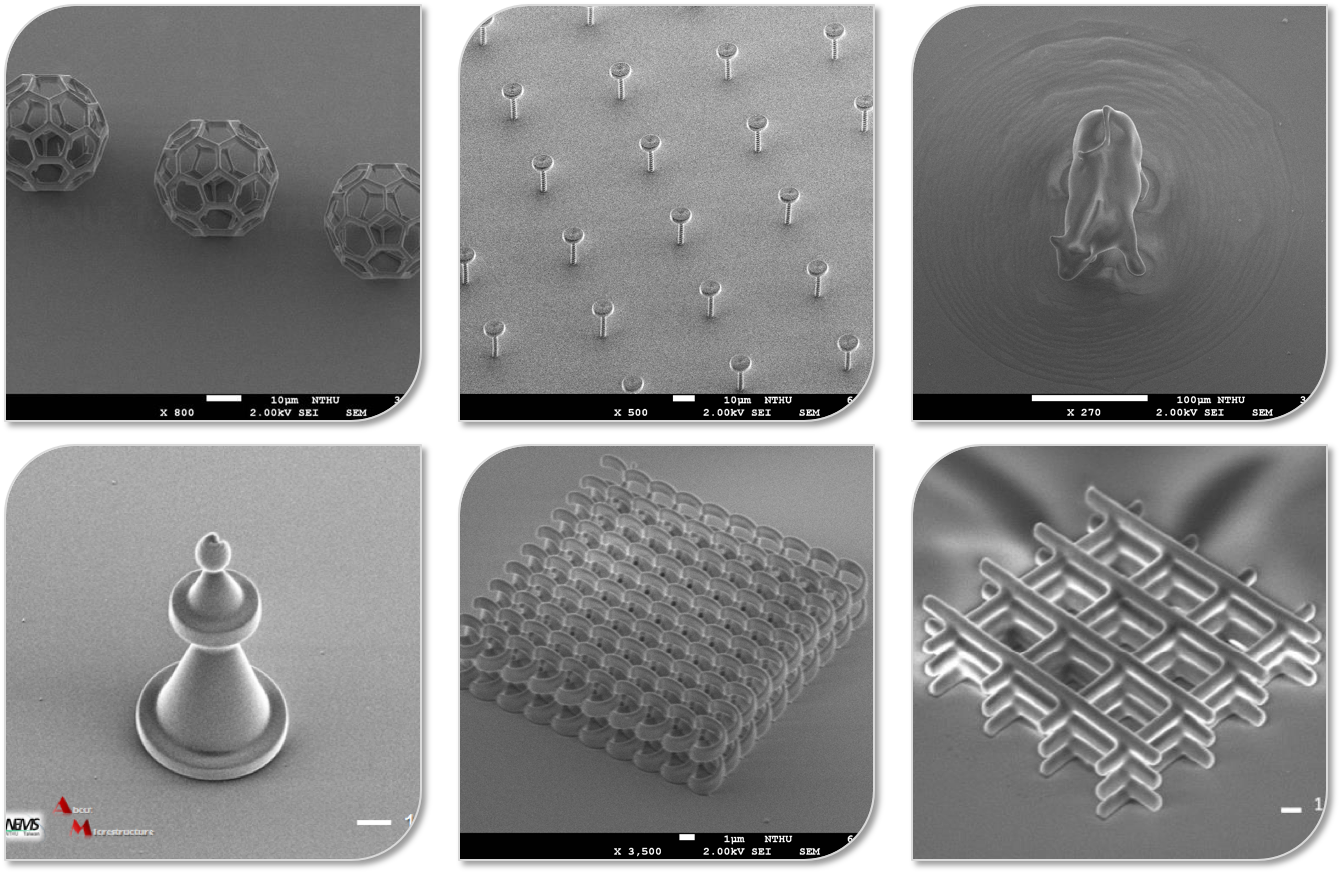
圖 4 使用780nm雷射加工結構測試結果
在3D加工中,若要連結位於不同基板的結構,就需要使用對位系統進行對準。傳統的對位方式通常採用孔與銷的機械結構,以實現被動對準。然而,由於雙光子加工是一種微米尺度的加工技術,對對位精度的要求相當高。若使用被動對準方式,將導致對位結構的加工精度需求急遽上升,進而提高加工成本。此外,當需要應對不同結構時,必須設計新的對位結構,耗時且耗力。
相反地,主動對準的對位方式相對簡單且節省時間與成本。該方法僅需要根據結構設計不同的對位標記即可。為此,本實驗室開發了主動對位加工模組,利用雙光子加工技術製作高精度的對位標記並透過傾斜校正、影像提取、自動對焦演算法以及影像座標與加工座標的轉換,成功實現了高精度的自動對位加工。這使得在空間中的任意兩個位置都可以輕鬆進行對位及加工。
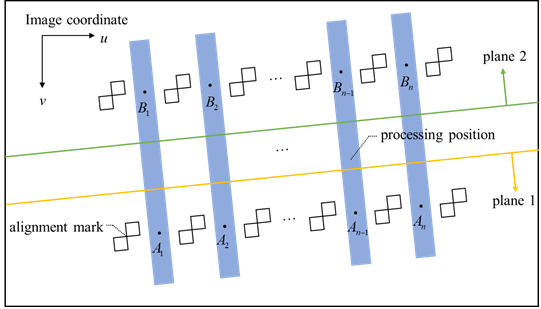
圖 5 主動對位標記 與 測試用線結構
[1] X. Zhou, Y. Hou, and J. Lin, “A review on the processing accuracy of two-photon polymerization,” AIP Advances, vol. 5, no. 3, 2015
| 指導教授 | 傅建中 教授 |
| 博士後研究員 | 吳明親 博士 |
| 碩士生 | 康碩傑 |
在過去在果蠅的行為研究上,研發出了各種行為觀測分析或者行為訓練的 系統,為了觀察不同的果蠅行為,這些觀測分析以及行為訓練系統各自有各自的 用途以及特色。然而至今仍然沒有一個研究團隊成功的開發出一套能夠即時分析 果蠅行為並且使用外部的刺激源應用在果蠅的光調控基因(Optogenetic)相關研就的實驗上,若是能夠開發出一套能夠如此應用的系統,相信在未來對果蠅腦部的 神經網路功能的了解必定能有大幅度的突破.
在此我們成功開發出一套經由即時影像處理技術分析多隻果蠅社交行為並且搭配三隻不同波段雷射刺激光源在不同的階段給予果蠅不同的刺激,透過這樣的即時訓練系統科學家可以針對果蠅是如何形成記憶(memory formation)方面做深入研究並且也可以透過這樣的系統找出每個神經元是如何控制果蠅的運動方式(Locomotion),所以這樣一套系統對於生命科學研究領域來說有著極為重要的幫助.
圖1(a)為本系統架構示意圖,組成本系統主要包含了影像擷取模組(CCD camera, 白光LED照明模組)、我們自行設計的果蠅行為觀測盒(Behavioral arena)、雷射掃描模組(Laser scanning module)、中央處理系統,四大部份.圖1(b)為系統硬體圖,圖1(c)雷射掃描模組的工作狀態圖,本系統可以將三隻不同的雷射光源整合在同一路徑上,圖1(d)為利用Labview 開發出的友善人機界面(Graphical User Interface).
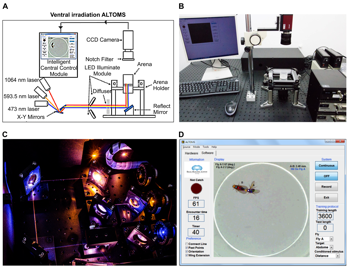
圖1
除此之外我們為了讓此套系統能夠執行更多不同生物實驗我們在原有系統額外發展溫控系統,藉由調控果蠅行為觀測盒內的溫度激發或抑制果蠅的特定神經,透過這樣的機制也可以從實驗中找出果蠅神經元上下游間的關係.圖2為溫控系統硬體圖.

圖2
圖3為在汞燈照射下由於我們不讓果蠅看到看加熱汞燈在閃爍,我們在燈罩前緣加了一片濾波鏡(>650nm Long filter),由於果蠅可見光波段為400nm-600nm,所以我們選用大於600 nm 可通過的濾鏡來濾掉短波段的光源, 但由於剩下波段的光源還是會發出接近紅光的顏色所以會導致CCD camera 在截取影像時會有紅色光源干擾程式的分析,圖3為經過我們修正影像處理的程式後系統依然可以有效地分析果蠅的行為.
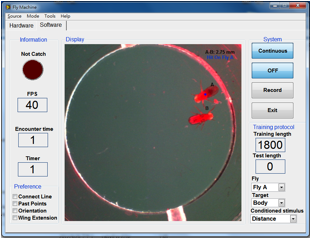
圖3
結論
此套系統的成功開發對於腦神經科學領域有著很重要的貢獻,透過此套系統科學家們可以了解腦部是如何運作腦神經間的上下游是如何去傳遞及如何去調控生物本身的動作及反應,對於未來破解生物腦部是如何運作扮演著很重要的角色,本系統目前也繼續擴充其他方面的功能,讓這套系統能夠執行更多生物相關的實驗研究.
Journal
Conference
| 指導教授 | 傅建中 教授 |
| 研究助理 | 林寶德 |
| 博士生 | 曾國鈞、楊音光 |
| 碩士生 | 許顥騰、陳銘章 |
本實驗室成功利用MATLAB軟體開發出雷射干涉微影的模擬程式。本程式可以模擬不同干涉微影系統的曝光後電場的分布、正光阻或負光阻曝光的圖案形狀和曝光的時間。藉由此程式,本實驗室模擬出多道光雷射干涉微影和多次曝光類射干涉微影在產能上之比較。
本實驗室和產業式合作,設計並發展出一台全自動的雷射干涉微影機台。
本實驗室發展出一全新的光纖式雷射干涉微影。光纖式雷射微影技術利用單模光纖代替空間濾波器系統,其優點為均勻分布的點光源、單模光纖輸出端依然保持線性偏振的光學特性,減少TM波對干涉對比度的影響、減少雷射干涉微影系統光路總行程,藉此減少環境擾動或溫度變化,導致光學機構不穩定因素、搭建模組化光路系統,降低光路對位的困難,並且藉由模組化來使系統整合更加富有彈性。
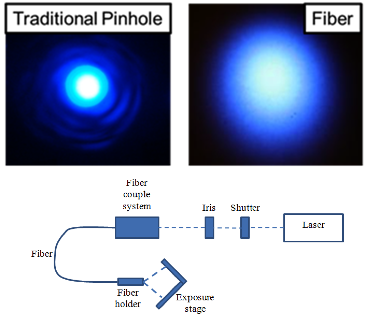
雷射的輸出能量呈現高斯分布,為了提升干涉微影曝光結果的均勻度,必須將雷射光束擴大,並利用光束中間能量較均勻的部分進行曝光微影,如此以來浪費了部分的雷射光束能量。本實驗室設計一光束平坦化的裝置,可以使原本強度呈高斯分布的雷射光,經由擴束並通過本裝置後,形成能量均勻分布之平頂光束,並用於雷射干涉微影以達到較佳的曝光效果。
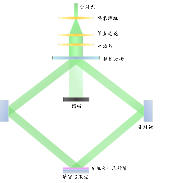
本實驗室利用消色差(Achromatic)原理,使用光柵對雷射擴束光進行分光,進而進行雷射干涉微影。消色差干涉微影的優點在於其穩定性高,且其曝光的干涉條文與雷射波長無關,可以去除雷射本身不穩定造成的曝光缺陷。
Journal
Conference
Patent
本實驗室以先進的LIGA及UV-LIGA微加工技術為核心,發展光電及生醫領域”關鍵元件的製造技術”。本實驗室緊密結合了國立清華大學及國家同步輻射研究中心的設備,建立了全國屬一屬二的LIGA微加工技術的發展平台。


